
El control de malezas es esencial en los huertos de manzanos, ya que compiten con los árboles por nutrientes, agua y luz solar, lo que puede reducir la producción de fruta.
por Jeff Mulhollem, Universidad Estatal de Pensilvania
Sin embargo, eliminar las malezas físicamente no solo requiere mucha mano de obra, sino que también puede dañar la estructura del suelo y las raíces de los árboles. El uso de pulverizaciones químicas para eliminar las malezas puede causar otros problemas, como contaminación, resistencia a los herbicidas y exceso de residuos químicos en las manzanas.
Manejo preciso de malezas y robótica
Otra opción, denominada manejo preciso de malezas (detectar y medir las malezas con gran precisión y luego aplicar pequeñas cantidades de herbicida para controlarlas eficazmente), puede ayudar a los agricultores a evitar el desperdicio de productos químicos o daños a los cultivos o al medio ambiente, según un equipo de investigadores de Penn State. Para ayudar a los agricultores a lograr un manejo tan preciso, los investigadores están desarrollando un sistema automatizado y robótico de manejo de malezas.
Los investigadores informaron sobre un primer paso en ese proceso en la edición de diciembre de Computers and Electronics in Agriculture : un modelo de visión artificial de IA que desarrollaron que puede encontrar, delinear, interpretar y estimar con precisión la densidad de malezas en huertos de manzanos.
Cámaras de visión artificial y de visión lateral
El sistema, destinado a guiar el futuro pulverizador robótico de precisión, utiliza una innovación en visión artificial que permite que una cámara lateral detecte e identifique las malezas para su tratamiento, incluso las malezas que están parcialmente ocultas.
«En entornos complejos como los huertos de manzanos, es difícil desarrollar mecanismos de detección de malezas debido a que la copa de los árboles y las ramas bajas bloquean la visión desde arriba, lo que impide el uso de sistemas tradicionales de cámaras cenitales, como los drones, ya que no pueden ver con claridad las malezas en el suelo», explicó el líder del equipo y autor principal del estudio, Long He, profesor asociado de ingeniería agrícola y biológica. Su grupo de investigación en la Facultad de Ciencias Agrícolas ha estado estudiando y desarrollando sistemas robóticos de agricultura de precisión durante la última década.
Una cámara lateral puede ser útil, pero la maleza puede ser parcialmente visible u oculta tras objetos no identificados o troncos de árboles. Esto causa problemas como la identificación errónea de la maleza o la pérdida de su seguimiento en tiempo real.
Mejora de los modelos de aprendizaje profundo para la detección
Para superar estos desafíos, Lawrence Arthur, primer autor del estudio y candidato a doctorado del Departamento de Ingeniería Agrícola y Biológica, dirigió al equipo en la mejora de un modelo de aprendizaje profundo disponible comercialmente para el programa informático de visión artificial. El modelo ya era capaz de detectar y segmentar objetos rápidamente, lo que significa que puede encontrar la maleza y delinear su forma exacta, píxel a píxel.
Para mejorarlo, los investigadores añadieron un módulo que ayuda al modelo a prestar atención a las características más importantes de la imagen, eliminando la información irrelevante de la escena. Esta innovación mejoró la precisión cuando partes de la maleza están ocultas o son difíciles de distinguir, explicó He. Además, integraron un algoritmo de seguimiento con un mecanismo de filtrado para un seguimiento más eficaz de la maleza.
El algoritmo preserva la identidad de las malezas en todos los fotogramas del video y evita que se cuenten varias veces, explicó. Esto permite al sistema rastrear las malezas cuando desaparecen brevemente al ser bloqueadas por los manzanos o incluso otras malezas.
Pruebas y resultados en huertos de manzanos
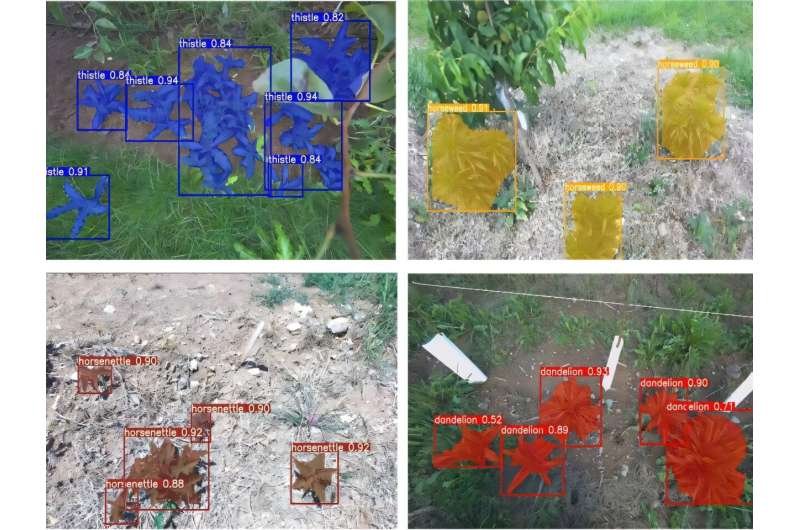
Los datos del estudio se recopilaron en el Centro de Investigación y Extensión Frutícola de la Universidad Estatal de Pensilvania en Biglerville y en huertos de manzanos cercanos. Las especies de malezas incluían diente de león, cerraja común, cola de caballo y ortiga de Carolina. Los investigadores tomaron fotos de alta resolución de estas malezas para formar el conjunto de datos para entrenar y probar el modelo de IA.
«El modelo logró una alta precisión y recuperación para la detección de malezas, lo que lo hace ideal para el manejo automatizado de malezas en huertos frutales», señaló. Logró una precisión promedio del 84,9 % en la detección de segmentación y del 83,6 % en la localización. Estas cifras indican una alta precisión para detectar malezas y delinearlas.
Al rastrear imágenes entre fotogramas, el modelo obtuvo una precisión del 82 % en el seguimiento de múltiples objetos, lo que significa que logró una alta precisión en el seguimiento de múltiples malezas; del 78 % en el seguimiento de múltiples objetos, lo que significa que logró una buena precisión al estimar la posición de las malezas; y del 88 % en la puntuación de identificación, lo que demuestra una gran capacidad para mantener correctamente la identidad de las malezas entre fotogramas de vídeo. Finalmente, el modelo solo registró seis cambios de identidad en el estudio, señaló He, lo que significa que rara vez confunde una maleza con otra durante su seguimiento.
Equipo de investigación e impacto futuro
La investigación supone un gran paso hacia el control automatizado y preciso de las malezas en la agricultura, según He.
«Al combinar una mejor detección y un seguimiento más preciso con una estimación de densidad adicional, el modelo que desarrollamos proporciona una detección de malezas más precisa y consistente, incluso en condiciones difíciles en los huertos», afirmó. «Al proporcionar datos útiles para el manejo de malezas en cada sitio, este enfoque mejorará la eficiencia de los herbicidas y reducirá el desperdicio».
Contribuyeron a la investigación Caio Brunharo, profesor adjunto de ciencia de malezas; Paul Heinemann, profesor de ingeniería agrícola y biológica; Magni Hussain, profesor adjunto de investigación de electrónica, instrumentación y sistemas de control; y Sadjad Mahnan, asistente de posgrado en el Departamento de Ingeniería Agrícola y Biológica.
Más información: Lawrence Arthur et al., YOLOv7-CBAM y DeepSORT con análisis de cuadrícula de píxeles para la localización de malezas en tiempo real y la estimación de la densidad intrafila en huertos de manzanos, Computers and Electronics in Agriculture (2025). DOI: 10.1016/j.compag.2025.111071
