
En el sector agrícola, la escasez de mano de obra aumenta la necesidad de cosechas automatizadas mediante robots. Sin embargo, algunas frutas, como los tomates, son difíciles de cosechar.
por la Universidad Metropolitana de Osaka
Los tomates suelen dar frutos en racimos, lo que requiere que los robots recojan los maduros y dejen el resto en la rama, lo que exige capacidades avanzadas de toma de decisiones y control.
Cómo aprenden los robots a recoger tomates
Para enseñar a los robots cómo convertirse en recolectores de tomates, el profesor adjunto Takuya Fujinaga, de la Escuela de Posgrado de Ingeniería de la Universidad Metropolitana de Osaka, los programó para evaluar la facilidad de cosecha de cada tomate antes de intentar recogerlo.
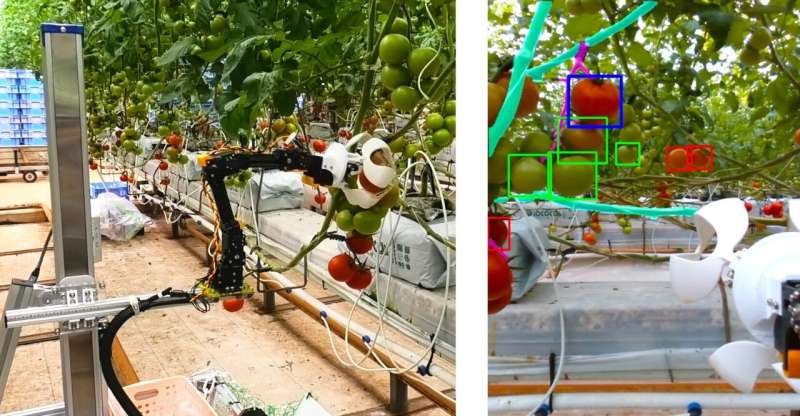
El nuevo modelo de Fujinaga utiliza reconocimiento de imágenes junto con análisis estadístico para evaluar la dirección óptima de aproximación para cada fruta. El sistema incluye el procesamiento/visualización de imágenes de la fruta, sus tallos y si está oculta tras otra parte de la planta. Estos factores informan las decisiones de control del robot y le ayudan a elegir la mejor aproximación. Los hallazgos se publican en Smart Agricultural Technology .
Pasando del reconocimiento a la facilidad de cosecha
El modelo representa un cambio de enfoque: del modelo tradicional de detección/reconocimiento a lo que Fujinaga denomina una estimación de la facilidad de cosecha. «Esto va más allá de simplemente preguntar: ‘¿Puede un robot cosechar un tomate?’, a considerar: ‘¿Qué probabilidad hay de una cosecha exitosa?’, lo cual es más relevante para la agricultura en el mundo real», explicó.
Durante las pruebas, el nuevo modelo de Fujinaga demostró una tasa de éxito del 81 %, muy por encima de las predicciones. Cabe destacar que aproximadamente una cuarta parte de los éxitos correspondieron a tomates cosechados con éxito desde el lado derecho o izquierdo, que previamente no se habían podido cosechar con un enfoque frontal. Esto sugiere que el robot cambió su dirección de aproximación cuando inicialmente tuvo dificultades para recolectar la fruta.
Implicaciones para el futuro de la agricultura
En definitiva, la investigación de Fujinaga destaca los matices que implica la recolección de fruta para robots, con factores como la agrupación de la fruta, la geometría del tallo, las hojas de fondo y la oclusión, todos ellos importantes. «Esta investigación establece la ‘facilidad de cosecha’ como una métrica cuantitativamente evaluable, lo que nos acerca un paso más a la creación de robots agrícolas capaces de tomar decisiones informadas y actuar con inteligencia», afirmó.
Fujinaga prevé un futuro en el que los robots podrán determinar de forma independiente si los cultivos están listos para la cosecha. «Se espera que esto marque el comienzo de una nueva forma de agricultura donde robots y humanos colaboren», explicó. «Los robots cosecharán automáticamente los tomates fáciles de recoger, mientras que los humanos se encargarán de las frutas más difíciles».
Más información
Takuya Fujinaga, Creando un robot agrícola inteligente: Un análisis de la facilidad de cosecha de tomates, Smart Agricultural Technology (2025). DOI: 10.1016/j.atech.2025.101538
